Motion Guided Hand-eye Calibration Commands
In motion guided hand-eye calibration, the motion system is responsible for initializing a hand-eye calibration, computing the next target pose and triggering the vision system after stage finishes moving to the target pose, and ending the hand-eye calibration when all poses are run through. Whereas the vision system acts in response to the motion system's commands.
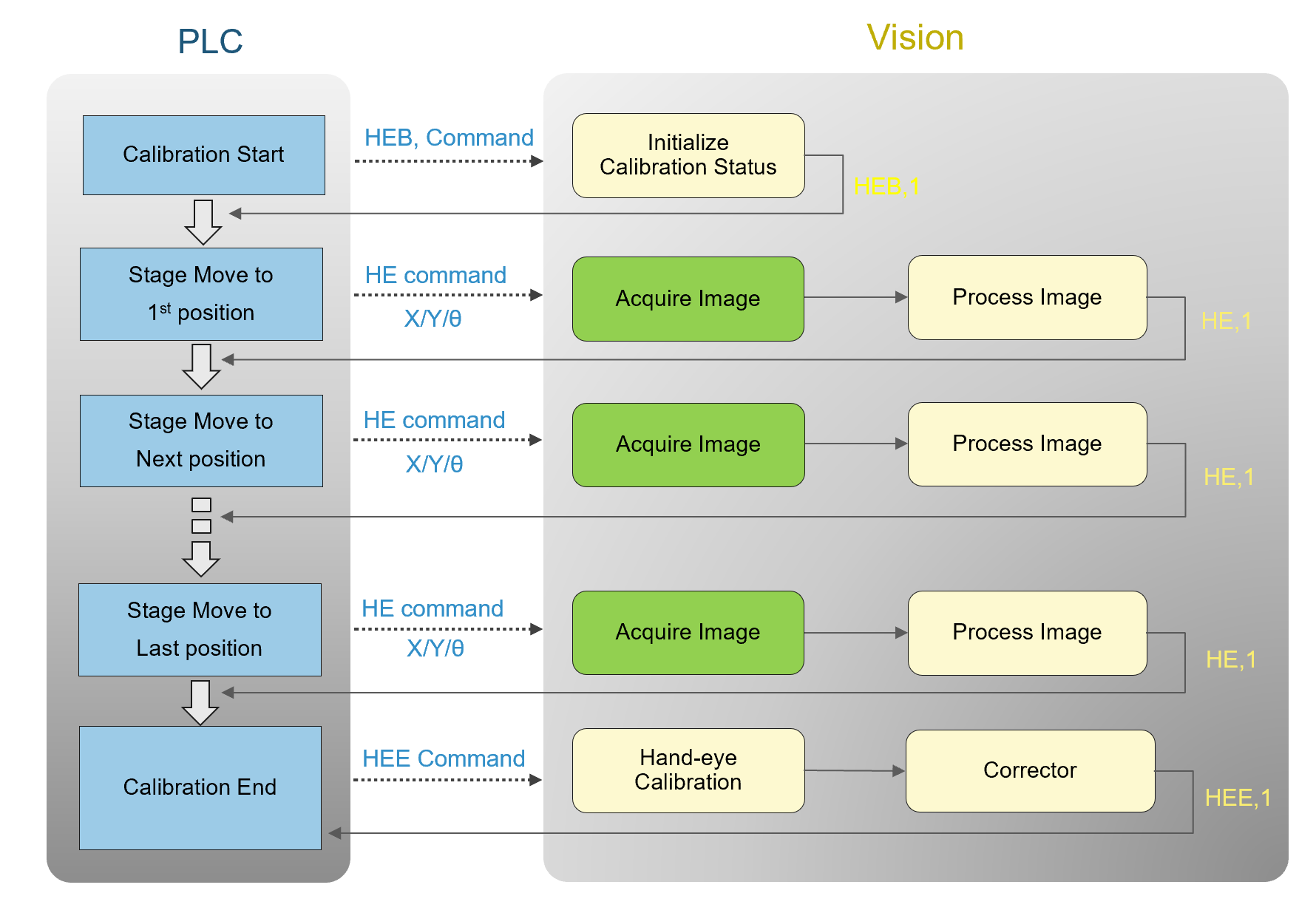
HEB
HEB stands for hand-eye calibration begins, it initiates a motion guided hand-eye calibration.
Command String
HEB,<EncodedID>
| Field | Arguments |
|---|---|
| <EncodedID> | EncodedID = StepID of hand-eye calibration task + Process Tag(2000) |
Result String
HEB,<Status>CR/LF
| Field | Arguments |
|---|---|
| <Status> |
The result status 1 : Success ErrorCode: Fail |
HE
Executes a hand-eye calibration task to acquire images and accumulate extracted features of calibration target at a certain stage pose.
Command String
HE,<EncodedID>,<TargetID>,<X>,<Y>,<Z>,<A>,<B>,<C>
| Field | Description |
|---|---|
| <EncodedID> | EncodedID = StepID of hand-eye calibration task |
| <TargetID> |
0 (not used) |
| <X> | The X-coordinate of the current position of the motion system |
| <Y> | The Y-coordinate of the current position of the motion system |
| <Z> | 0 (not used) |
| <A> | The theta(in Degree) of the current position of the motion system |
| <B> | 0 (not used) |
| <C> |
0 (not used) |
Result String
HE,<Status>CR/LF
| Field | Arguments |
|---|---|
| HE |
Command Key |
| <Status> |
The result status 1 : Success ErrorCode : Fail |
HEE
HEE stands for hand-eye calibration end. It triggers the vision system to compute the hand-eye calibration results based on the data collected in the previous “HE” steps.
Command String
HEE,<EncodedID>
| Field | Arguments |
|---|---|
| <EncodedID> | EncodedID = StepID of hand-eye calibration task + Process Tag(2000) |
Result String
HEE,<Status>CR/LF
| Field | Arguments |
|---|---|
| <Status> |
The result status 1 : Success ErrorCode : Fail |